モータ / アクチュエータ
ボイスコイルモータ

小型、高出力、高精度で、カスタム対応可能なVCM
小型、高出力、高精度で、お客様の要望に柔軟に対応可能なVCMです。
カスタマイズや制御方法などについてもお気軽にご相談ください。
ボイスコイルモータ(VCM)とは?
VCM は ボイスコイルモータ(Voice Coil Motor)の略称であり、Nd-Fe-B磁石が作る強力な磁界の中をコイルのみが往復運動するタイプの単相モータです。ラウドスピーカーとまったく同じ原理で電気シグナルを機械運動に変換します。
また、可動部が軽く、しかもダイレクトドライブであるため、一般のアクチュエータよりも高速で、かつ電気シグナルに合わせて運動することができます。
ボイスコイルモータ(VCM)の原理
VCM は、磁石のエネルギー(磁場)を媒体として電気エネルギーを運動エネルギーに変換する機能を持ち、磁石の大半がこの用途に使用されています。
VCM は、可動部の構造により、大きく次の2種類に区別されます。
01.可動コイル型
(ムービングコイル)
磁石が作る磁場の中でコイルのみが動くモータ
02.可動磁石型
(ムービングマグネット)
ヨークとコイルが作る磁場の中で磁石が動くモータ
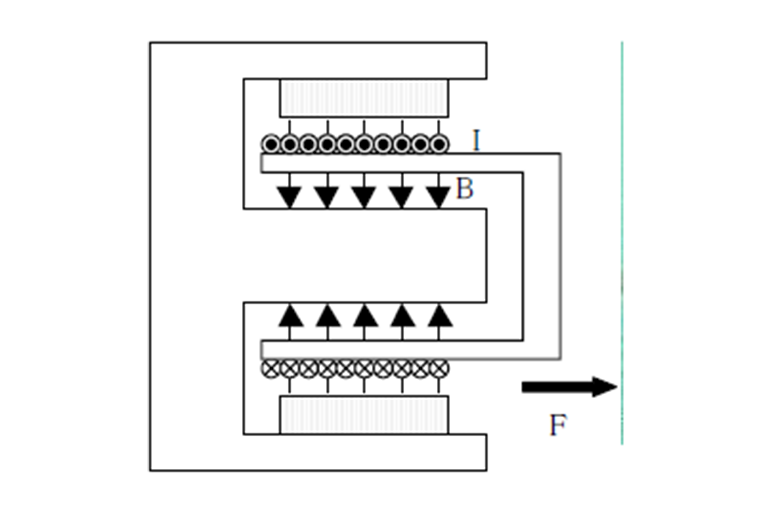
VCM は、磁場中の導体に電流を流した時、フレミング左手の法則により下図の向きに力が発生する動作原理を利用したものです。
このとき、VCM に発生する力は、以下で与えられます。
F=B・I・L
F:力 (N)
B:磁束密度 (T)
I:電流 (A)
L:磁場中のコイル線材長さ(m)
特長
強力な磁場の中を可動子だけが運動することから、VCM には従来のモータに無い以下のような特長があります。
- ムービングコイルの場合、可動子(コイル&ボビンで構成)が超軽量のため、ワークにダメージを与え難く、高加速動作が可能
- 単相コアレスのため、転流やコギングによる推力リップルが小さく、繊細でスムーズな制御が可能
- コイルインダクタンスが小さく可動部が軽量なため、動作応答性に優れ、高周波動作が可能(スピーカーと同じ原理)
- 通電電流に比例した推力が発生(磁場等の影響に依る)するため、精密荷重制御が可能
メリット
また、弊社でご提供可能なVCM には、更に以下3 点のメリットがあります。
- NEOMAX 磁石の採用により小型化、高出力化を実現
- モータ形状に自由度があり、さまざまな機構に組込み・カスタマイズが可能
- ご使用になるVCM、またその制御方法にマッチしたドライバ、コントローラと組み合わせたソリューションのご提供が可能
構成例
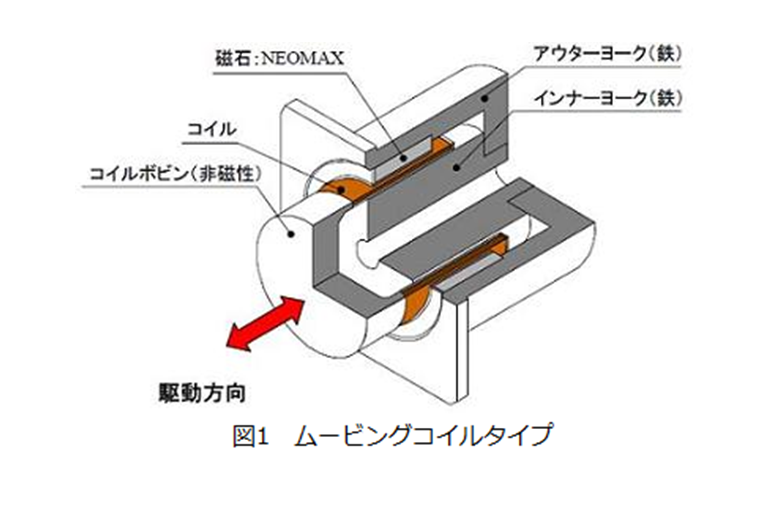
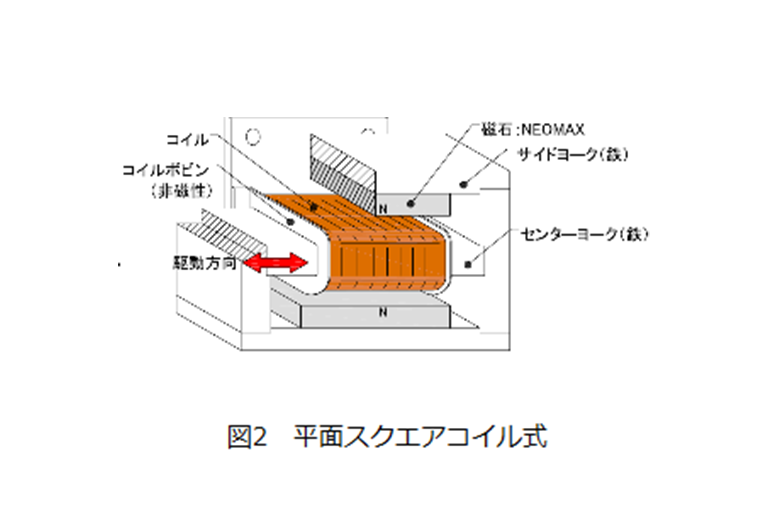
図1のようなムービングコイルタイプの円筒形や図2の平面スクエアコイル式は、大推力に適しています。
平面フラットコイル式は全体の厚みを薄く出来ます。 ムービングコイル式としては、他にスイング型等も設計可能です。
また、配線の引き回しに優位なムービングマグネットタイプなど、推力やストロークを含めたご要望に合わせて、多様な形状提案が可能です。
VCMの制御方法
単純なON/OFF制御であれば、電源を接続しON/OFFするだけでも制御可能です。
ただし、下記の点にご留意ください。
過電流に注意
電流または電圧制限を行い、過電流が流れぬようにご注意ください。
電流によるVCM温度上昇に十分配慮した設計が必要となります。
推力制御には電流制御を推奨
VCM推力は電流に比例します。
電圧制御だとVCM温度と共にコイル抵抗が変化し、電流が安定しません。
推力安定化のためには電流制御を推奨します。
位置/速度制御にはサーボドライバを推奨
位置/速度制御を行うにはサーボドライバの使用を推奨します。
VCM推力の温度変化
VCMの推力は主に下記1.2.の影響で温度変化します。
- 磁束密度変化の影響で、VCM温度10℃上昇あたり推力は約1%低下します。(ネオジム磁石の場合)
- 電圧制御では、コイル抵抗と共に電流が変化し、10℃上昇あたり推力は約4%低下します。
(銅線コイルの場合)
なお、電流制御の場合は 2.の影響は考慮不要です。
温度による推力変化を抑えるには、電流制御を推奨します。
VCM制御におすすめのアンプ/ドライバ
一般にはDC電源入力のPWMサーボアンプ/ドライバを推奨します。
用途により推奨アンプは異なります。
荷重制御(電流制御)のみの場合
シンプルで電流制御の可能なJunus(ジュナス)を推奨します。
(逆起電圧を利用した簡易速度制御も利用可能)
用途により Accelnet(アクセルネット)などの方が向く場合もありますので ご相談ください。
位置/速度制御の必要な場合
エンコーダやレゾルバにより位置フィードバック可能なAccelnet(アクセルネット)を推奨します。
電流分解能:12bitで、動作プログラムの保存も可能な標準ドライバです。
より高精度/高機能が必要な場合
Accelnetの上位機種、Accelnet Plus(アクセルネットプラス)を推奨します。
電流分解能:16bitで、アブソリュートエンコーダにも対応しています。
PWMノイズを嫌う場合
リニアアンプなどを別途推奨いたします。
別途ご相談ください。

